概 述
WTL-3122系列电气动阀门定位器是引进国外最新技术。由我厂研制成功的新产品。其技术性能均达到国外同类产品水平。它与气动调节阀、气动球阀、气动蝶阀等配套使用,将电动调节器的直流电流信号转换成气压力,控制阀门动作,同时根据阀门的位移或转角进行反馈,从而构成闭环控制回路,用以提高阀门的控制精度。克服真料函与阀杆的摩擦力。克服介质压差对阀门不平衡力,提高阀门动作速度。可实现分程控制(段幅信号),可改变阀的作用方式,可控制非标准操作压力各类型气动执行机构。
特 点
1、适用范围广:本定位器的放大器既适用于单作用型执行器,也适用于双作用执行器。
2、气动功率大,动作速度快,力平衡采用多回路,不易振荡,动作性能稳定。
3、本定位器具有正反作用的作用方式,可简单方便地调换安装校正。
4、一般定位器的恒节流孔经常会阻塞不通,导致定位器不正常工作的现象很多,而本定位器设计制造的恒节流孔机构,通针可以动作,方便疏解通孔,保持工作气路畅通无阻。
5、具有良好的复合防爆功能:由于线圈部件与接线盒采用可靠的防爆结构,各机构设计成组件化,所以该产品具有良好的复合防爆功能,它同时具备本质安全型“i”(ExdⅡCT6),隔爆型“d”(ExdⅡBT6)。
6、本定位器的外壳防护等级为IP65。
7、结构紧凑,精密可靠。本产品零部件精密压铸,外型及内部结构工艺精致。各机构经优化组合设计,整体结构紧凑,采用不锈钢紧固件和先进的喷涂工艺处理、生产制造标志永久性等,具备了良好的防腐性能。
8、调校简单,安装方便:本定位器不需打开外壳亦可实现调整零点,行程范围调节方便,范围宽度大。定位器表壳(罩盖)用两只不锈钢螺钉紧固,安装打开可靠方便,表壳(罩盖)螺钉无散乱脱落和咬死现象。在定位器底面设有安装用的螺孔和根据要求附配过渡联接的安装板,从而可以适用于各种气动执行机构的方便地安装。
|
输入信号:
|
4-20mA.DC(标准型、常规产品) |
|
| 4-12mA.DC、12-20mA.DC) |
|
| 0-10mA.DC(变型产品) |
| (0-5mA.DC、5-10mA.DC) |
| 输出压力: |
0.02-0.7MPa |
耗 气 量:
|
5NL/min单作用(供气0.14MPa) |
|
| 15NL/min双作用(供气0.4MPa) |
|
| 输出特性: |
线性,等百分比,非线性 |
|
| 气源压力: |
0.14-0.7MPa |
|
| 额定行程: |
0-(10-100)mm。 |
|
| 基本误差: |
±1%(单作用);±1.5%(双作用) |
|
| 回 差: |
1%(单作用);1.5%(双作用) |
|
| 死 区: |
0.2%( 单作用);0.4%(双作用) |
|
| 环境温度: |
-35℃~ +60℃ |
|
| 相对湿度: |
≤90% |
|
| 防爆型式: |
隔爆型d(ExdⅡBT6);本质安全型(ExiaⅡCT6) |
|
| 输入阻抗: |
4~20mA.DC/250Ω±5%(20℃时) |
|
| 气源接口: |
Rc1/4(标准型) |
|
| 电源接口: |
G1/2(标准型) |
|
| 外壳材料: |
铝合金,喷塑工艺处理 |
|
| 外型尺寸: |
192(长)×218(宽)×75(高)mm |
|
| 重 量: |
1.7Kg |
|
■结构图
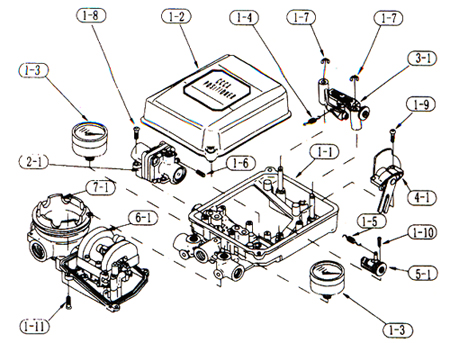
■部件表
|
NO |
名称 |
数量 |
|
1-1 |
底座 |
1 |
|
1-2 |
罩壳 |
1 |
|
1-3 |
压力表 |
1(2) |
|
1-4 |
反馈弹簧 |
1 |
|
1-5 |
负载控制弹簧 |
1 |
|
1-7 |
E形止动圈 |
2 |
|
1-8 |
圆头小螺钉 |
4 |
|
1-9 |
圆头小螺钉 |
2 | |
|
NO |
名称 |
数量 |
|
1-10 |
圆着小螺钉 |
2 |
|
1-11 |
圆着小螺钉 |
1 |
|
2-1 |
调节装置 |
4 |
|
3-1 |
杆组件 |
1 |
|
4-1 |
凸轮部件 |
1 |
|
5-1 |
调零部件 |
1 |
|
6-1 |
扭力矩马达组件 |
1 |
|
7-1 |
电源接线盒 |
1 | |
■维护
1、定位器的气源处理装置应使用精度超过5μ的空气过滤器。
2、内部的节流部件如有尘埃、会引起零点漂移等现象,因此在定期保养时应使用清洗装置,保持喷嘴畅通。
3、阀座的高速与定位器灵敏及泄气量直接有关,在出厂检验时调好,在使用时尽量不要再调。
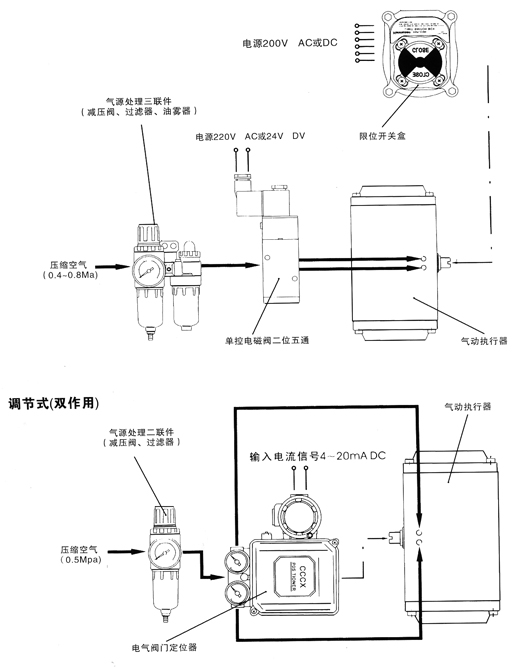
■双作用式
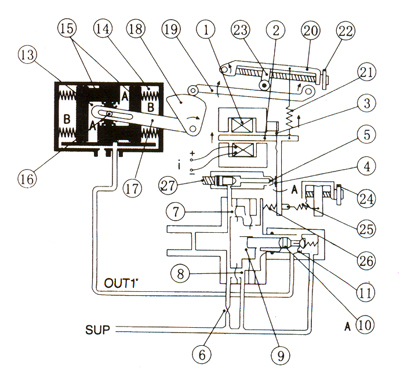
来自气源SUP的一部分压力空气经过固定节流口(6)进入喷嘴的背压室(7),并通过喷嘴(5)与挡板(4)的间隙排出。力矩马达的线圈(1)得到电信号(i)后,在磁场作用下衔铁(2)以支点板弹簧(3)为中心。按图中A所示方向回转,使挡板(4)与喷嘴(5)的间隙减小、喷嘴的背压随之升高,控制阀的阀蕊(9)由供气压力室(8)的作用下向右移动。阀孔A(10)的气门(11)及阀孔B(10)阀的气门(12)被打开,即压力空气通过气管OUT1进入气缸的A室(13)气缸B室(14)的空气通过气管OUT2向外排气,此时由于气缸活塞(15)向两端方向移动通过齿条带动输出轴旋转,输出轴的旋转运动带动所馈连杆(17)与凸轮(18)并带动凸轮随动杆(19)及反馈弹簧连杆(20),增加了反馈弹簧(21)的张力。使挡板(4)喷嘴(5)之间的间隙增大。在反馈弹簧(21)的张呼与输入电信号(i)对衔铁的吸力达到平衡之前,活塞是动动的,输出轴的位移与输入信号成正比。另外,旋钮(22)可调节滑块(23)的行程,旋钮(24)可调节调零弹簧(25)的张力。而且改换负载弹簧(26)可获得相应的弹簧特性系数,以适应各种容量的定位器。
上述为活塞向两端方向移动工作状态,如进出气管位置互换或将凸轮反装,即呈向中间方向移动工作状态。
■单作用式
来自气源SUP的一部分压力空气经过固定节流口(6)进入喷嘴的背压室(7),并通过喷嘴(5)与挡板(4)的间隙排出。力矩马达的线圈(1)得到电信号(i)后,在磁场作用下衔铁(2)以支点板弹簧(3)为中心。按图中A所示方向回转,使挡板(4)与喷嘴(5)的间隙减小、喷嘴的背压随之升高,控制阀的阀蕊(9)由供气压力室(8)的作用下向右移动。阀孔A(10)的气门(11)被打开而气门(12)被关闭,与气管OUT1连通的气缸(13)内的气压增加,活塞(15)向两端方向移动弹簧(14)被逐渐压缩通过齿条带动输出轴旋转,该输出轴(16)的旋转通过反馈杆(17),凸轮(18),凸轮随动杆(19),反馈弹簧连杆(20)使色馈弹簧(21)的张力增加,挡板与喷嘴的间隙增大。输出轴(16)的位置在与输入信号达到平衡前输出轴是运动的。另外,旋钮(24)可调节调零弹簧(25)的张力,若将A-M手动自动转换器(27)置于全封闭状态时,喷嘴背压室(7)内的压力就上升,供气阀(11)呈全工状态,气源压力就直接经气管OUT1,进入气缸(13),即换负载弹簧(26)获得相应的弹簧特性系数,以适应各种容量的定位器,上述为活塞向两端方向移动工作状态,如进出气管互换将凸轮翻面安装,即呈向中间方向移动工作状态。
■外形尺寸

■控制系统接线图
开关式(双作用)